。
海底光纜如何“防腐”?
海底光纜由于長期浸泡在濃度高的海水中,所以極易受到海水腐蝕。此外,氫分子會擴散到光纖的玻璃材料中,使光纖的損耗變大。因此海底光纜既要防止內(nèi)部產(chǎn)生氫氣,同時還要防止氫氣從外部滲入光纜。目前,海底光纜的結(jié)構(gòu)是將經(jīng)過一次或兩次涂層處理后的光纖螺旋地繞包在中心,加強構(gòu)件(用鋼絲制成)包在周圍。
放個海底的實物圖,更直觀:

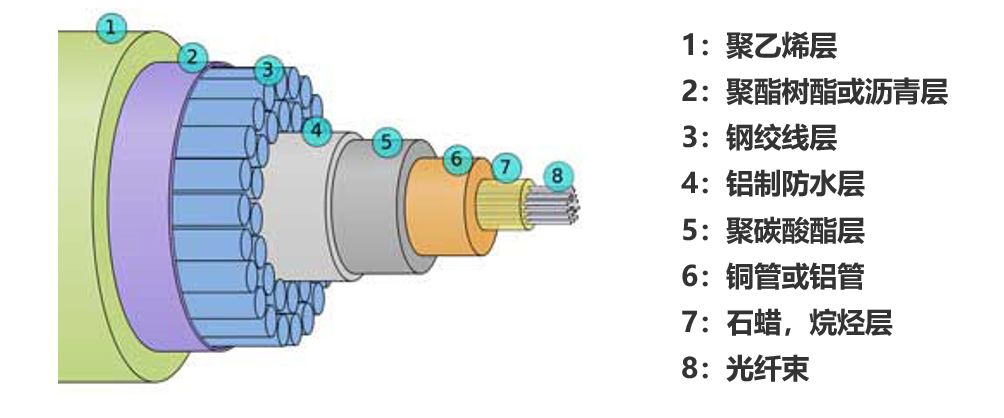
海底光纜看上去有點像輸油管道,其實,海底光纜和陸地光纜最大的區(qū)別就是它的“鎧裝保護”。一般來說,“鎧裝保護”包括下圖所示的幾層:
之所以要這么多層的保護,就是因為海底光纜面對的海底環(huán)境極其復(fù)雜嚴苛。首先是海水的腐蝕,海底光纜的外層聚合物層就是為了防止海水和加固鋼纜反應(yīng)產(chǎn)生氫氣。即使外層真的被腐蝕,內(nèi)層的銅管、石蠟、碳酸樹脂也會防止氫氣危害到光纖。氫氣分子的滲入,會導(dǎo)致光纖傳輸衰耗增加。
除了海水腐蝕之外,海底光纜還要承受海底壓力,以及自然災(zāi)害(地震、海嘯等)、人為因素(漁民打撈作業(yè))的重重考驗。如果沒有加強鎧裝的保護,海底光纜是無法長期穩(wěn)定工作的。
但是,即便有這么嚴實的保護,海底光纜仍然不能永久使用,它的使用壽命一般來說只是25年。
海底光纜如何檢測?
海底光纜的損壞情況
造成海底光纜損壞的因素可分為兩類:一類是人為因素,諸如漁業(yè)活動、船只拋錨等;另一類是自然災(zāi)害,包括地震和海嘯等。人類活動是海底光纜損壞的主要因素,據(jù)有關(guān)統(tǒng)計,海洋水產(chǎn)養(yǎng)殖及漁業(yè)活動、船舶拋錨、海洋工程等因素造成的光纜損壞占全部光纜損壞的95%左右。
通常情況下,拋錨能夠破壞海底光纜的絕緣層、電導(dǎo)體、光纖,甚至完全切斷海底光纜,進而引起絕緣失效、電路損壞、光纖失效甚至光纜斷裂。
海底光纜的維修
首先,對損壞的海底光纜進行測試,根據(jù)測試結(jié)果
,可初步確定海底光纜的狀態(tài)和大致?lián)p壞位置
,制定維修方案
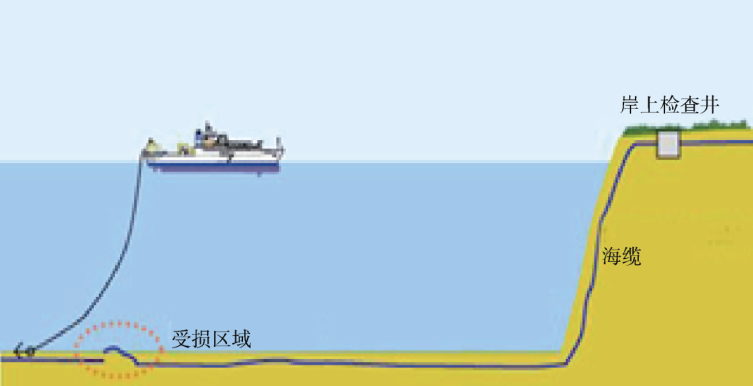
;其次,打撈海底光纜
,根據(jù)打撈方案,使用海纜敷設(shè)船在靠近斷點附近打撈回收海底光纜
,處理斷點兩端
,系上標記;隨后
,清掃維修段海底路由,找到合適維修和掩埋布設(shè)路由
。完成上述操作后
,海底光纜重新接通;打撈出水的海底光纜被連接起來
,并做好絕緣處理;測試正常后
,完成第一次接通
。隨后
,維修段運至預(yù)期埋設(shè)點
,轉(zhuǎn)運至埋設(shè)機準備埋設(shè);接著
,進行第二次接通測試
;最后
,使用水下機器人對海底光纜斷點兩端進行測試
;測試正常后
,兩端托起光纜
,敷設(shè)船進行敷設(shè)施工
,完成光纜維修。
在整個維修過程中,測量斷點位置并精確定位斷點位置是一個關(guān)鍵技術(shù)。定位斷點包括測試斷點距離近岸距離和準確定位斷點位置兩個方面
。
海底光纜斷點位置的確定
在岸上確定光纜斷點的方法有多種,常用的方法包括光時域反射計測試法、電壓測試法
、電容測試法、音頻測試法
、在線監(jiān)測法等
。
光時域反射計測試法是利用瑞利散射原理,根據(jù)測試數(shù)據(jù)可判斷出斷點距離
,并與原始記錄進行比較,可在海圖上大致確定斷點的經(jīng)緯度
。方便的做法是將斷點坐標標注在海底光纜施工圖上,同時標注相應(yīng)的打撈區(qū)域
,確定打撈位置
、打撈路徑及其他打撈標志。但是
,由于裸露段光纜被海水沖刷,相對施工位置有較大偏移
,導(dǎo)致通過比對斷點距離和施工圖紙準確確定斷點位置的可能性很小
。
海底光纜的檢測方法
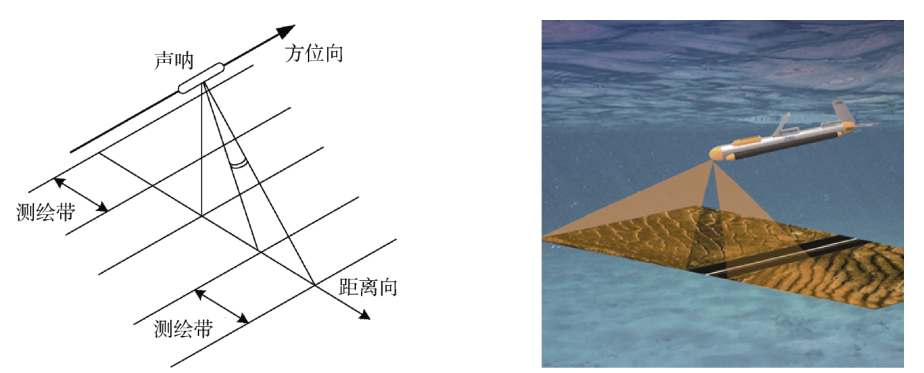
近年來,隨著聲吶技術(shù)的發(fā)展,聲吶提供了一種經(jīng)濟有效的海底光纜維修手段。使用聲吶
,可探測海底光纜在海床的裸露段
,測量掩埋深度
,確定光纜位置
,檢測光纜在海床狀態(tài)
,調(diào)查布設(shè)區(qū)海床地形地貌等。
與此同時 ,海底光纜水下機器人巡檢、維修技術(shù)也得到快速發(fā)展
。通過潛水員和作業(yè)船進行海底光纜檢測
、打撈的方法,逐漸被水下機器人作業(yè)取代。由于在工作深度
、探測范圍
、連續(xù)工作時間等方面的優(yōu)勢,水下機器人探測技術(shù)突破了深度
、潛水員工作時間和環(huán)境要求、作業(yè)船低效率拖曳等瓶頸
,在深水區(qū)海底光纜檢測
、維護方面已完全取代潛水員和船只拖曳作業(yè)模式。
海底光纜水下機器人檢測技術(shù)
水下機器人用于海底光纜巡檢時,首先使用AUV對海纜布設(shè)區(qū)域進行掃測,找到光纜斷點位置
。然后使用ROV輔助打撈作業(yè)
,吹除泥沙暴露光纜,使用機械手剪斷光纜
,抓取光纜帶到海面。與此同時
,水下機器人將無線信號收發(fā)器放置光纜斷點位置
,以便后續(xù)維修時連接使用。通過信號收發(fā)器提供的位置
,將光纜另一端打撈出水。在工作母船上
,用相應(yīng)裝置連接光纜兩端
,使用近端登陸站信號進行檢測,確定光纜故障端
。切除故障部分
,進行重新接通,進行信號測試
,通訊正常后
,按程序進行水下重新布設(shè)
。
通過以上分析可以看出 ,水下機器人技術(shù)解決了我國海底光纜打撈的重大難題,即工作深度的限制
、定位精度和檢測效率問題。水下機器人工作深度不受限制
,可以根據(jù)巡檢作業(yè)要求設(shè)計不同工作深度的AUV
。機器人技術(shù)代替人工作業(yè),可避免潛水員生命危險
,大大提高工作效率。通過纜線跟蹤技術(shù)
,探測傳感器可獲取更多穩(wěn)定的探測效果
,取得更高質(zhì)量的數(shù)據(jù)。AUV可在廣闊范圍內(nèi)
,以極高的效率
、極低的花費,實現(xiàn)管線目標的連續(xù)跟蹤探測
。因此,水下機器人在海底光纜檢測
、維修方面具有廣闊的應(yīng)用空間
。
海底光纜無人艇檢測技術(shù)
除了使用水下機器人進行海底光纜巡檢外,無人艇在水下管線自動檢測方面也展現(xiàn)出極大潛能。無人艇是集成多傳感器的智能化設(shè)備,通過傳感器獲取海底管線狀態(tài)
,自動
、經(jīng)濟地完成管線檢測。其體積小
、質(zhì)量小、吃水淺
,且無需人員隨艇作業(yè)
,非常適合執(zhí)行淺水區(qū)域(如海島礁周邊
、灘涂區(qū)
、潮間帶等)海底光纜檢測任務(wù)
。
2019年,裝載多波束測深儀的M40型無人艇完成了海底石油管線檢測,發(fā)現(xiàn)總長超過1000米的7處暴露段。2019年9月,XOCEAN使用XO-450型和MBES型管線檢測無人艇在英格蘭東海岸和德國沿岸開展了管線檢測。2019年3月,搭載側(cè)掃聲吶的TC40型無人艇用于長江流域排污管道檢測。
國外發(fā)展現(xiàn)狀
國外海底光纜無人檢測機器人正快速發(fā)展,技術(shù)已較為成熟 。成立于1936年的法國ECA公司,已供貨軍用和民工水下潛艇
。早在1980年
,公司設(shè)計了第一代無人水下自動無人艇(ALISTAR 3000AUV)
,用于海底管線檢測
。隨后又發(fā)展出A18TD和A18D型產(chǎn)品。工作深度覆蓋20~3000m
,連續(xù)工作時間可達12小時
,巡航速度3kn
。能夠攜帶多種傳感器
,如側(cè)掃聲吶、多波束測量裝置
、淺地層剖面儀及其他便攜型傳感器
。
A18TD工作水深20~3000m,相對第一代產(chǎn)品,續(xù)航能力提高一倍,達到24小時,巡航速度3kn,右舷可搭載右視合成孔徑聲吶、多波束測量設(shè)備、攝像機;左側(cè)可搭載左視合成孔徑聲吶、濁度計、熒光計、甲烷傳感器等。A18D工作水深5~3000m,3kn航速下可續(xù)航24小時,可搭載側(cè)掃聲吶、多波束聲吶、淺地層剖面儀、前視聲吶、溫鹽深剖面儀及其它海洋環(huán)境測量傳感器。
挪威CC公司研制的HUGIN管線檢測AUV可搭載多波束聲吶(KongsbergEM2040)、側(cè)掃聲吶(EdgeTech120/410 kHz)、淺地層剖面儀(EdgeTech 1~6kHz)、高分辨率水下相機、溫鹽深剖面儀等設(shè)備。除了傳統(tǒng)傳感器,德國Ilmenau大學研制的AUV還可搭載磁場探測陣列。
休斯頓機械電子公司稱其研制的Aquanaut水下機器人是世界首款雙模機器人,具有水下變形重組能力
。
通常來講,傳統(tǒng)的水下無人航行器可分為兩類:一類是魚雷型自航航行器,另一類是用于業(yè)務(wù)化測量偵察的滑翔型航行器。Aquanaut機器人兼具兩者優(yōu)勢
,在執(zhí)行長航程任務(wù)時
,是一個魚雷型機器人,具有長距離探測海底管線的能力
,使用鋰電池時其續(xù)航能力可超過200km
。
國內(nèi)發(fā)展現(xiàn)狀
目前,國內(nèi)一些研究所涉足AUV自動監(jiān)測海底管線研究領(lǐng)域。大部分研究僅依靠單一傳感器,如水下相機、低照度相機、前視聲吶等,在水池開展實驗,還不具備獨立探測海底管線的技術(shù)。海底光纜自動檢測,在國內(nèi)還有很大發(fā)展空間。
中國海洋大學研制的“藍鯨”海纜檢測機器人已初具能力,實現(xiàn)了精確導(dǎo)航、實時觀測、智能航行、靈活自適應(yīng)跟蹤等功能。在此基礎(chǔ)上,“藍鯨”可進一步升級,加裝高精度設(shè)備,提高海纜檢測精度,進行模塊化設(shè)計,根據(jù)檢測目標定制針對性設(shè)備,實現(xiàn)機器人的多功能擴展
。
浙江啟明電力集團公司研制的“啟明”海底光纜維修機器人,能夠準確快速定位光纜斷點,大大縮短搜尋時間
。能夠安全、高效完成附屬設(shè)施的打撈
,并在修理完畢后進行布設(shè)。此外
,該AUV還可搭載更多設(shè)備
,完成多種水下作業(yè)。
中信重工機械股份有限公司研制的KC-ROV水下機器人,可加載聲吶探測設(shè)備,實現(xiàn)大范圍
、長距離探測
,最大作業(yè)深度300米,最遠探測距離120米。
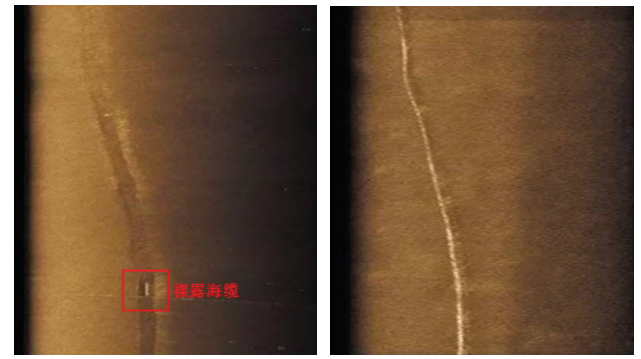
中科院研制的“遠征2號”水下機器人,搭載了高低頻合成孔徑聲吶
,能夠同時工作在高低頻段
,比其他聲吶技術(shù)更適合海底管線探測
。低頻具有一定穿透能力,能夠探測掩埋管線目標
,探測掩埋深度可達2米
,具有較強的探測效能
,探測效果如下圖所示
。
長期以來,海底光纜屢遭破壞,導(dǎo)致通訊阻塞,造成巨大經(jīng)濟損失 。維護損壞的海底光纜
,首先需要快速準確地定位光纜損壞段
,斷點的快速檢測和精確定位是一個重要問題
。隨著水下無人技術(shù)的發(fā)展
,為海底光纜檢測提供了一種有效手段
,通過多平臺多傳感器的搭配使用,可逐步實現(xiàn)光纜斷點的三維檢測和精確定位
。
在無人艇加裝高、低頻合成孔徑聲吶、多波束聲吶及其它長距離探測設(shè)備
,可實現(xiàn)海底以上200米以內(nèi)的快速大范圍探測,通過多傳感器數(shù)據(jù)融合
,獲取海底光纜的位置信息
,引導(dǎo)AUV設(shè)備進行抵近探測。AUV設(shè)備上搭載的探測設(shè)備
,如磁探陣列
、高分辨率水下相機
、激光掃描儀等
,探測精度較高
,但探測范圍有限。在領(lǐng)受任務(wù)后
,AUV航行到相關(guān)區(qū)域
,在固定高度(如距底5米)進一步獲取目標的精確位置
、尺寸
、磁特征、損壞狀況等信息